
Uued tehislihased: kergemad, turvalisemad ja robustsemad robotid
Zürichi polütehnikumis tehtud uuringutest – tehnoloogia lihasrühmade jaoks, mis on inimeste omadega sarnasemad ja tundlikud keskkonnaga suhtlemisel
ETH Zürichi teadlased on hiljuti välja töötanud kunstlihased roboti liikumiseks, kuid nende lahendus pakub mitmeid eeliseid võrreldes varem nähtud tehnoloogiatega.
Väärib edasist uurimist, seda saab kasutada kõigil juhtudel, kui robotid peavad olema pigem pehmed kui jäigad või peavad olema keskkonnaga suhtlemisel tundlikumad.
Paljud robootikud unistavad robotite ehitamisest, mis poleks ainult metallist või muudest kõvadest materjalidest ja mootoritest kombineeritud, vaid ka pehmemad ja kohanemisvõimelisemad.
"Pehmed" automaadid võivad keskkonnaga suhelda täiesti erineval viisil; Näiteks võivad nad pehmendada põrutusi nagu inimese jäsemed või haarata objektist õrnalt.
See annaks eeliseid ka energiatarbimise osas: tänapäeval nõuab robotite liikumine tavaliselt palju energiat, et asendit pikka aega säilitada, samas kui pehmed süsteemid suudaksid seda paremini salvestada.
Niisiis, mis võiks olla ilmsem kui võtta eeskujuks inimese lihased ja proovida seda uuesti luua?
Hüvasti, NCCR Robotics: kaksteist aastat Šveitsi teenistuses
On olemas droon, mis "ronib" puude otsa, et neid kaitsta

Iga loomulik lihas tõmbub kokku ka vastusena piisavale elektriimpulsile
Tehislihaste toimimine põhineb tingimata bioloogial.
Nagu nende loomulikud kolleegid, tõmbuvad tehislihased elektrilise impulsi toimel kokku.
Tehislihased ei koosne aga rakkudest ja kiududest, vaid vedelikuga (tavaliselt õliga) täidetud kotist, mille kest on osaliselt kaetud elektroodidega.
Kui need elektroodid saavad elektripinget, tulevad nad kokku ja suruvad vedeliku ülejäänud kotti, mis paindub ja suudab seetõttu raskust tõsta.
Üks kott on analoogne lühikese lihaskiudude kimbuga.
Mitu neist kottidest saab omavahel ühendada, moodustades tervikliku tõukejõuelemendi, mida nimetatakse ka ajamiks või lihtsamalt tehislihaseks.
Auhind ProteusDrone'ile, pehmele mutantse kujuga robotile
Robotkoer: loomabioloogiast inspireeritud Šveitsi leiutis
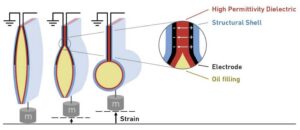
(Illustratsioon: Gravert et al/Science/ETH Zurich)
Algselt vajasid elektrostaatilised ajamid pinget 6.000 kuni 10.000 XNUMX volti
Kunstlihaste arendamise idee pole uus, kuid siiani on nende realiseerimisel olnud suur takistus: elektrostaatilised ajamid töötasid ainult ülikõrgete pingetega, umbes 6.000–10.000 XNUMX volti.
Sellel nõudel oli mitmeid tagajärgi: näiteks pidid lihased olema ühendatud suurte raskete pingevõimenditega, need ei töötanud vees ega olnud inimesele täiesti ohutud.
Nüüdseks on välja töötanud uue lahenduse Robert Katzschmann, Zürichi ETH robootikaprofessor koos Stephan-Daniel Graverti, Elia Varini ja teiste kolleegidega.
Nad avaldasid teabeveebisaidil “Science Advances” artiklis oma kunstlihase versiooni kohta, millel on tegelikult mitmeid eeliseid.
Stephan-Daniel Gravert, kes töötab Robert Katzschmanni laboris teadusliku assistendina, disainis kotile uue kesta.
Uus Inglise-Šveitsi tulekustutusdroon tuletõrjujatele abiks
Nii õpivad robotid Šveitsis trekimise saladusi

(Foto: Gravert ja teised, Teadus, 2024)
Lahendus tulevikuks? Tänapäeval on see pärit suure läbilaskvusega ferroelektrilisest materjalist
Teadlased nimetavad uusi tehislihaseid HALVE täituriteks, kus HALVE tähistab "hüdrauliliselt võimendatud madalpinge elektristaatiline".
“Teistes ajamites asuvad elektroodid kesta välisküljel. Meie puhul koosneb kest mitmest kihist. Võtsime suure läbilaskvusega ferroelektrilise materjali, mis suudab salvestada suhteliselt suuri koguseid elektrienergiat, ja ühendasime selle elektroodide kihiga. Seejärel katsime kõik polümeerkattega, millel on suurepärased mehaanilised omadused ja mis muudab koti stabiilsemaks.selgitab ta.
Nii suutsid teadlased vajalikku pinget vähendada, sest ferroelektrilise materjali palju suurem läbilaskvus võimaldab madalast pingest hoolimata saavutada suuri jõude.
Stephan-Daniel Gravert ja Elia Varini mitte ainult ei arendanud koos välja HALVE täiturmehhanismide kesta, vaid ehitasid ka täiturmehhanismid ise laboris kasutamiseks kahes konkreetses robotis.
Tel Avivis Eneli laboratoorium tehisintellekti ja robootika kasutamise kohta energeetikas
Nii saab Atlase robot juba meiega töötada ja suhelda
(Foto: Gravert jt video ekraanipilt, Science, 2024)
Tehnilised “tangid” ja “kalad” näitavad, mida Šveitsis disainitud lihas suudab
Üks selline roboti näide on 11 sentimeetri kõrgune haarats, millel on kaks sõrme.
Igat sõrme liigutab kolm POOLE täiturmehhanismi järjestikku ühendatud taskut.
Väike akutoiteallikas varustab robotit 900 voltiga.
Aku ja toiteplokk koos kaaluvad vaid 15 grammi.
Kogu pidurisadul koos jõu- ja juhtelektroonikaga kaalub 45.
Haarats suudab haarata siledast plastesemest piisava jõuga, et oma raskust toetada, kui objekt köiega õhku tõsta.
„See näide demonstreerib suurepäraselt, kui väikesed, kerged ja tõhusad on HALVE täiturmehhanismid. See tähendab ka seda, et oleme teinud suure sammu oma eesmärgi poole luua integreeritud lihastepõhised süsteemid., ütleb Katzschmann rahulolevalt.
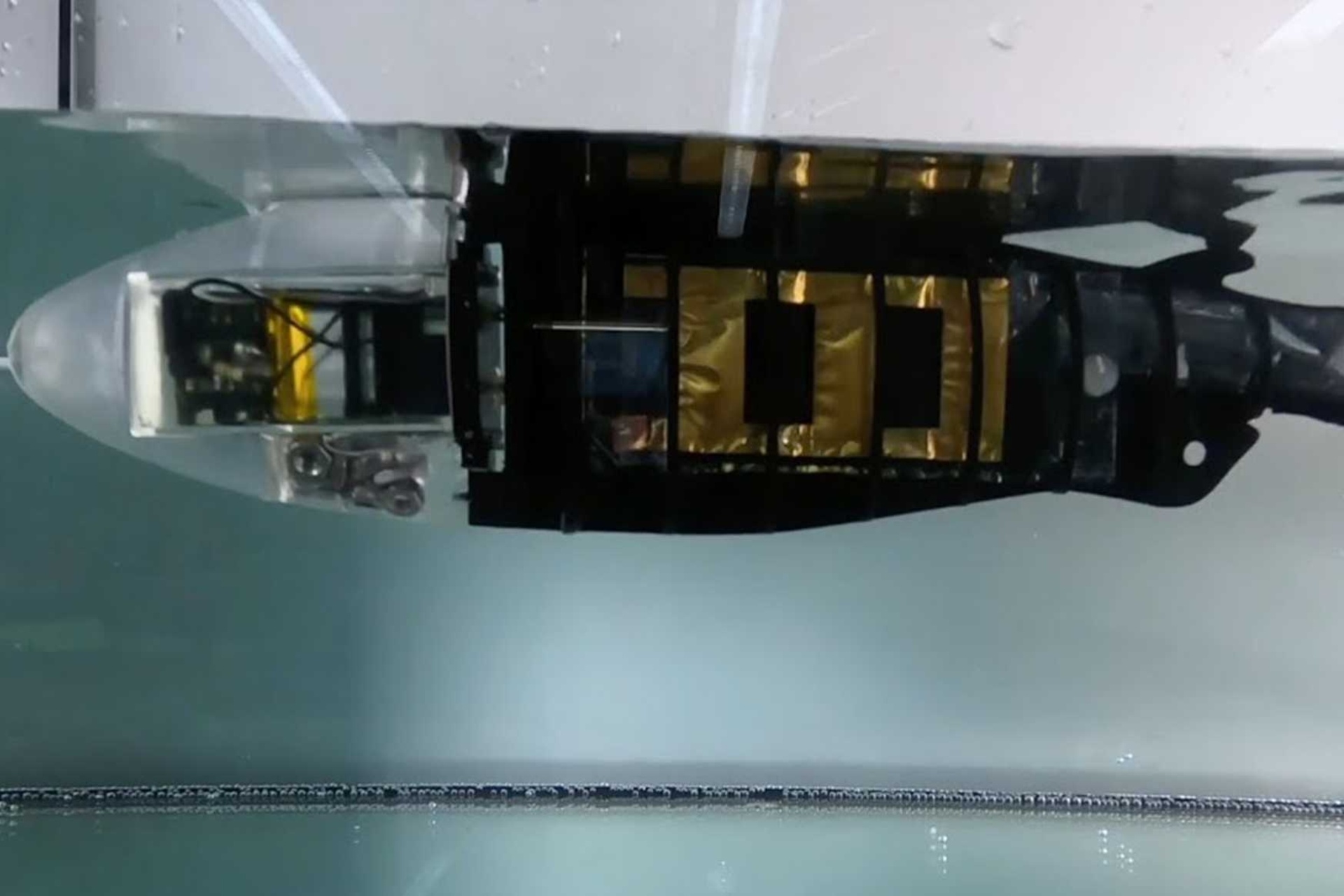
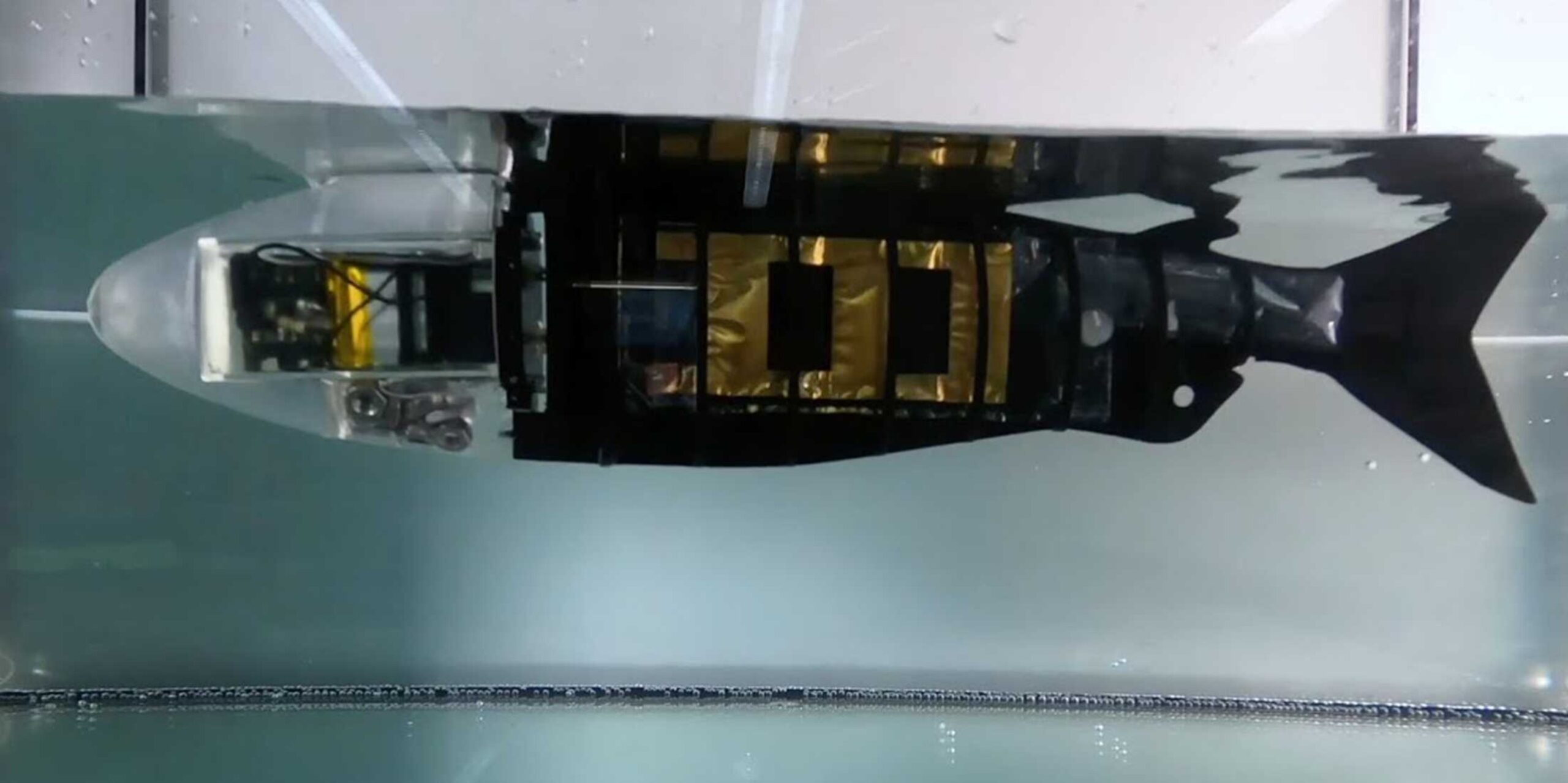
Teine objekt on ligi 30 sentimeetri pikkune kalataoline ujuja, mis suudab vees kergesti liikuda.
See koosneb elektroonikat sisaldavast "peast" ja painduvast "kerest", mille külge on kinnitatud "hüdrauliliselt võimendatud madalpinge elektristaatilised" täiturmehhanismid.
Need ajamid liiguvad vaheldumisi rütmis, mis tekitab tüüpilise ujumisliigutuse.
Autonoomne kala suudab staasiseisundist väljuda kiirusega kolm sentimeetrit sekundis 14 sekundiga ja seda kõike tavalisse kraanivette kastatuna.
Robotkoer: loomabioloogiast inspireeritud Šveitsi leiutis
Šveitsis föderaalne polütehnikumi läbipaistva ja usaldusväärse AI jaoks

Uued ajamid on teistest tehislihastest palju robustsemad ja ka veekindlad
See teine näide on oluline, kuna see demonstreerib veel ühte uut HALVE täiturmehhanismide funktsiooni.
Kuna elektroodid ei ole enam väljaspool kesta kaitstud, on tehislihased nüüd veekindlad ja neid saab kasutada isegi juhtivatesse vedelikesse kastatuna.
„Kala illustreerib nende täiturmehhanismide üldist eelist: elektroodid on kaitstud väliskeskkonna eest ja vastupidi, keskkond on elektroodidega kaitstud. Nii et saate neid elektrostaatilisi ajamid kasutada näiteks vees või puudutada., lisab Zürichi föderaalse tehnoloogiainstituudi professor.
Ümbriste kihilisel struktuuril on ka teine eelis: uued täiturmehhanismid on teistest tehislihastest palju robustsemad.
Ideaalis peaksid ümbrikud suutma palju liigutada ja tegema seda kiiresti.
Kuid isegi väikseim tootmisviga, näiteks elektroodide vahele jääv tolmukübe, võib põhjustada elektririkke, omamoodi "mini välgulöögi".
4. novembril Lausanne'is "Šveitsi robootikapäev"
DroneHubiga on drooniuuringute enneolematu… "linnumaja".

“Minivälgu” probleemid lahendatud, ettevõtted valmis suurtootmiseks
"Kui see juhtus eelmistes mudelites, põles elektrood läbi, tekitades kesta augu. See võimaldas vedelikul välja pääseda ja muutis täiturmehhanismi kasutuskõlbmatuks., selgitab Stephan-Daniel Gravert.
See probleem on lahendatud HALVE täiturmehhanismides, kuna üks auk sulgub sisuliselt ise, tänu kaitsvale välisele plastkihile.
Tänu sellele jääb korpus täielikult töökorras ka pärast elektrikatkestust.
Kaks teadlast on selgelt õnnelikud, et on tehislihaste arendamisel teinud otsustava läbimurde, kuid samas on nad ka realistlikud.
Nagu Robert Katzschmann ütleb, "Nüüd peame selle tehnoloogia ette valmistama suuremahuliseks tootmiseks ja me ei saa seda teha siin ETH laboris. Ilma liigseid paljastusi tegemata võin öelda, et juba registreerime huvi ettevõtete poolt, kes tahaksid meiega koostööd teha.
Näiteks saaks kunagi tehislihaseid kasutada uutes robotites, proteesides või kantavates seadmetes.
Teisisõnu, tehnoloogiates, mida kasutatakse inimkehas ja peal…
... silikoonist vaarikas, mis juhendab roboteid koristama
Õige austusavaldus Luganost noorele Smilebotsi robootikameeskonnale



Piiramatu haarats, mida juhivad POOLE täiturmehhanismid ja mis haarab kinni PLA ploki
Lõastamata kunstkala, mida juhivad HALVE täiturmehhanismid, kraanivees
Samuti võite olla huvitatud:

Taam Ja' on maailma sügavaim "sinine auk": avastus
Yucatani poolsaare juurest uuriti mereõõnsust, mis leiti neli korda sügavamalt kui eelmine rekordiline vajutus Belize'is

Brasiilias esimene kohtumine maailmas bioohutuse ja sünkrotronide vahel
Campinas ühendatakse osakeste kiirendi valgusallikatega NB4 tasemel maksimaalse bioloogilise isolatsiooni laboratoorium

Tänapäeval on Alto Adige linnas AI uus tugipunkt AI-le
PNRR-fondist eraldatakse 4,6 miljonit eurot Bolzanole kohalikele ettevõtetele pakutavate teenuste osutamiseks luureandmete digitaliseerimisel…
Austria, Saksamaa ja Šveits "uuenduslikumate" kaubaraudteede jaoks
DACHi ministrid Leonore Gewessler, Volker Wissing ja Albert Rösti: digitaalse automaatse sidumise kasutuselevõtt on võtmeelement

 //
//